Desde que la herramienta de modelado, denominada «Mapa de influencia acústica (AIM)», fue introducida con el lanzamiento del detector de defectos OmniScan™ X3, ha formado parte integral como herramienta de asistencia para diseñar los planos de escaneo del método de enfoque total (TFM). El Mapa de influencia acústica ofrece estimaciones con respecto a la cobertura de intensidad acústica del TFM en función de diferentes grupos de ondas TFM y tipos de difusores de señal, lo que permite crear un plan de escaneo que maximiza la probabilidad de detección (POD).
Con el lanzamiento de la versión 5.10 del software MXU, podrá beneficiarse de tres grandes mejoras aportadas al AIM cuyo objetivo es optimizar las capacidades y facilidad de uso de la herramienta de plan de escaneo del OmniScan X3 y X3 64.
1. Soportar geometrías de inspección 3D
Antes, el AIM soportaba solamente sondas lineales para las cuales el área de inspección del TFM se hallaba directamente bajo el primer eje de los elementos. Ahora, gracias a la actualización del MXU 5.10, el AIM soporta sondas Dual Linear Array™ (DLA) y Dual Matrix Array™ (DMA) para geometrías planas, de diámetro externo circunferencial (D. E. C.), y de diámetro externo axial (D. E. A.). Este cambio ha podido llevarse a cabo tras la revisión de la estructura fundamental del modelo AIM.
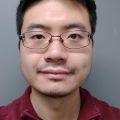
El modelo AIM actualizado proporciona resultados similares a otros paquetes comerciales de software de simulación acústica. Por ejemplo, a continuación, es posible comparar las imágenes generadas del modelo AIM actualizado con aquellas del mapa de sensibilidad obtenidas por el producto CIVA 2021 (desarrollado por CEA LIST) en el caso de un grupo de ondas L-L en el TFM para una geometría de D. E. A.
Modelo AIM (izquierda) y software CIVA (derecha) basados en la sonda A27 con geometría de D. E. A.
En el caso de este ensayo, la configuración se basa en una sonda 4DM16X2SM-A27 y una suela (zapata) SA27-DN55L-FD25-IHC-AOD10.75 sobre una tubería que mide 10,75 pulg. de diámetro externo (273,05 mm de D. E.). Tal y como puede verse, el modelo actualizado del AIM y el modelo del CIVA 2021 proporcionan mapas casi idénticos con respecto a la sonda DMA en esta geometría de D. E. A.
2. Precisión mejorada en el campo cercano de la sonda
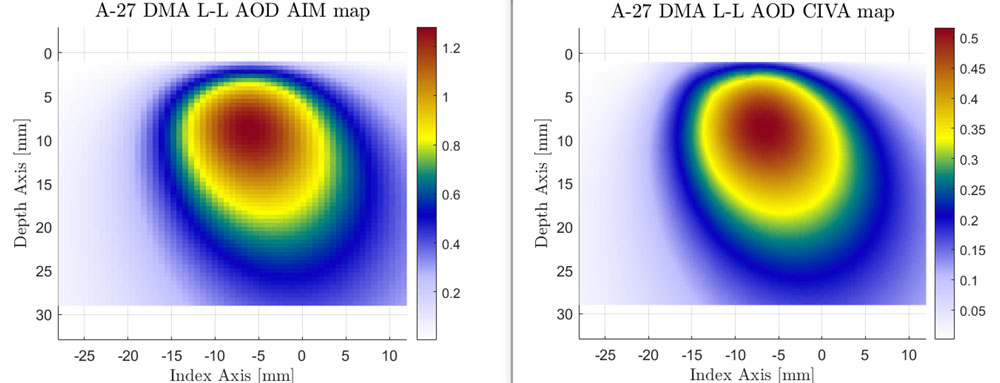
Un segundo beneficio de este modelo AIM revisado es una mejor precisión en cuanto a la simulación en el campo cercano de la sonda. Puesto que la precisión mejorada se percibe mejor en inspecciones de contacto, se usó una sonda de contacto de un solo elemento para preparar las representaciones a continuación. El tamaño del elemento era de 1 mm × 10 mm, y la frecuencia central era de 5 MHz.
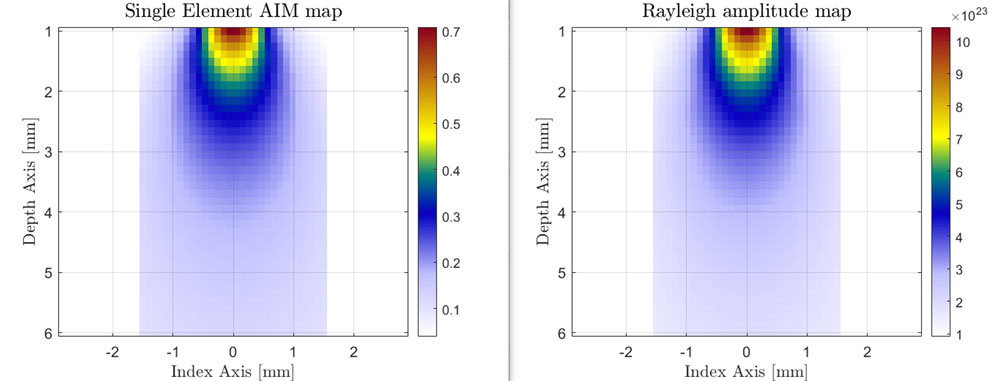
Las siguientes imágenes muestran la respuesta en el campo cercano del único elemento a partir del modelo AIM antiguo y del mejorado (revisado) frente al modelo numérico exacto de Rayleigh. El modelo exacto de Rayleigh se construye al sumar contribuciones de 100 000 fuentes puntuales, distribuidas de forma uniforme en la superficie del elemento único.
AIM mejorado vs. modelo exacto Rayleigh para la sonda de un solo elemento en el modo L-L
AIM anterior vs. modelo exacto Rayleigh para la sonda de un solo elemento en el modo L-L
Entre el modelo AIM mejorado y el modelo Rayleigh se nota la similitud incluso a una distancia de observación de 1 mm (0,04 pulg.) a partir de la superficie del elemento. En cambio, el modelo anterior AIM presenta oscilaciones en el campo cercano, lo cual podría afectar la precisión de la simulación en el modo de contacto de campo cercano.
3. Índice de sensibilidad normalizada
Antes de la versión 5.10 del software MXU, el índice de sensibilidad del AIM se presentaba en unidades proporcionales arbitrarias que podían ser usadas sólo para comparar la sensibilidad relativa entre los diferentes grupos de ondas. Ahora, el índice de sensibilidad ha sido reescalado para proporcionar una interpretación más intuitiva de la sensibilidad a través de un plan de escaneo. En la siguiente sección, conocerá los cálculos que el software MXU ejecuta para generar el índice de sensibilidad en cada AIM. Más adelante, también podrá visualizar algunos ejemplos concretos que favorecerán la interpretación del índice de sensibilidad normalizada y su aplicación de forma práctica.
Calcular el máximo teórico para el índice de sensibilidad del AIM
El índice de sensibilidad corresponde al valor de máxima amplitud en un AIM. En cada píxel, la amplitud está determinada por tres componentes: la respuesta de emisión, la respuesta de recepción, y el coeficiente de dispersión.
(1)
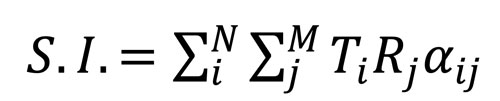
A continuación, se presentan las definiciones de la ecuación (1):
- N — Cantidad de elementos emisores; y, M es la cantidad de elementos receptores.
- Ti — Respuesta de emisión a partir del i-enésimo elemento emisor. Un valor máximo de 1 representa una emisión perfecta. En otras palabras, la intensidad emitida en el píxel presenta el mismo valor que la intensidad en la parte frontal del elemento emisor.
- Rj — Respuesta de recepción a partir del j-enésimo elemento receptor. Un valor máximo de 1 representa una recepción perfecta. Es decir, la intensidad de dispersión es recibida perfectamente en la parte frontal del elemento receptor.
- αij — Representa el coeficiente de dispersión a partir del i-enésimo elemento emisor hasta el j-enésimo elemento receptor. Un valor máximo de 1 representa una dispersión perfecta. Dicho de otra forma, la intensidad de la incidencia en el píxel se dispersa perfectamente hacia la dirección de recepción.
La Ecuación (1) muestra que el valor máximo teórico para la sensibilidad es NM si hay N elementos emisores y M elementos receptores. Sin embargo, el valor no puede ser alcanzado en las configuraciones TFM.
Diferencias en el índice de sensibilidad para los tipos de difusores planos y esféricos
Tal y como ocurría con las versiones anteriores del AIM, el AIM del MXU 5.10 soporta los difusores esféricos y planos. En el modelo AIM mejorado, el difusor esférico es tratado como un difusor de punto idóneo en el que la intensidad de incidencia en el píxel se ve dispersada perfectamente hacia la dirección de recepción. Es decir, αij tiene un valor de 1 en todas las combinaciones de emisores y receptores.
El difusor plano en el AIM es modelado como un vacío circular de 3 mm de diámetro. El coeficiente de dispersión αij es una función compleja de la frecuencia, como también los vectores normales, incidentes, reflejados y de observación en el espacio 3D. A continuación, se muestra un esquema de estos vectores:
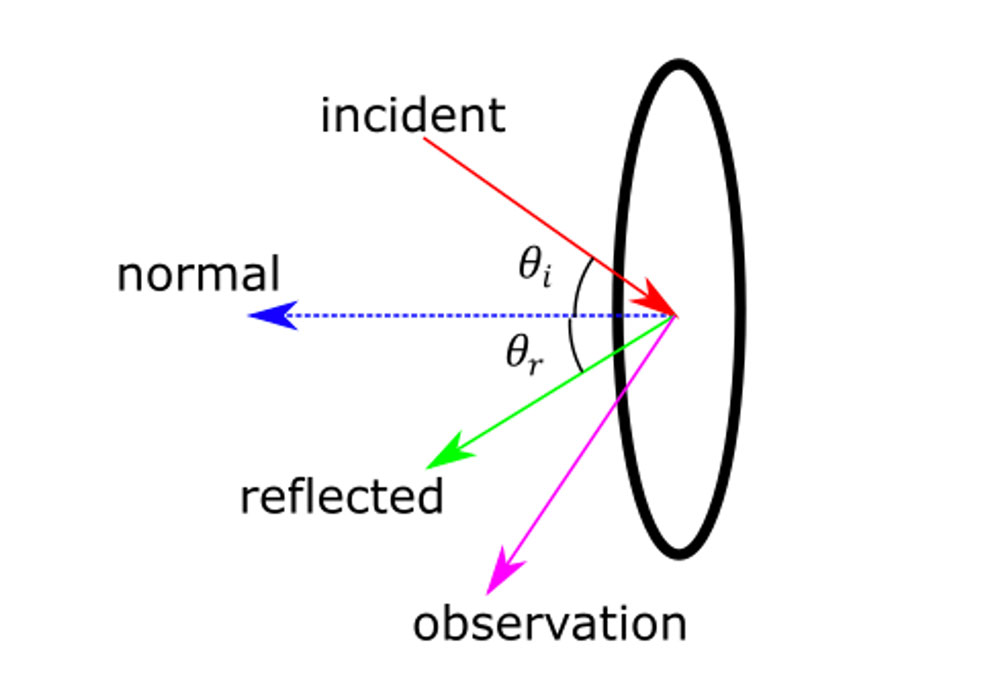
Esquema de los vectores normal, incidente, reflejado y de observación en un vacío circular
En el ejemplo del vacío circular, en la Figura 4, el ángulo reflejado θr sería igual al ángulo de incidencia θi si no hay modo de conversión en la superficie del difusor direccional. También, note que el vector de observación puede que no falsee el plano formado por los vectores normal, incidente y reflejado.
Para este tipo de difusor, el valor máximo αij de 1 es alcanzado si los vectores de incidencia, reflejado y de observación coinciden todos con el vector normal. Este sería el caso en el modo pulso-eco (pulse-echo) si los haces de emisión y recepción (pitch-catch) se hallan perpendiculares al defecto direccional de forma perfecta. Puesto que el valor αij es 1 para un único subgrupo especial de combinaciones Tx/Rx, por lo general el índice de sensibilidad para los AIM con respecto al difusor plano sería más bajo que el índice de sensibilidad correspondiente para un difusor esférico ideal.
¿Cómo interpretar y comparar el índice de sensibilidad normalizada del AIM?
En esta sección se ofrecen ejemplos de los AIM y de sus índices de sensibilidad en tres configuraciones diferentes que usan una sonda lineal 5L32-A32. En la parte inferior de cada ejemplo, se halla una explicación de cómo interpretar la representación.
En el caso de la primera configuración, la sonda es usada en contacto bajo el modo L-L; el AIM correspondiente para el difusor esférico puede visualizarse a continuación:
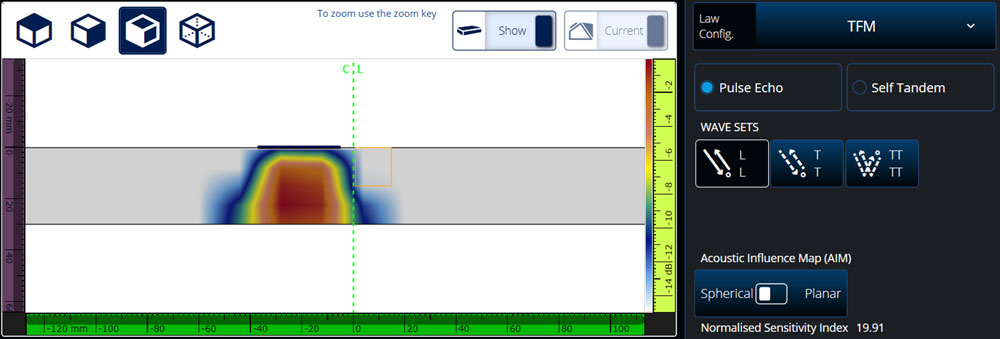
Configuración 1: AIM con sonda de contacto bajo el modo L-L sobre un reflector esférico (índice de sensibilidad = 19,91)
En el caso de esta configuración, el índice de sensibilidad normalizada es de 19,91 incluso a través del valor máximo teórico que es 1024 (32 elementos emisores y 32 elementos receptores). La desviación a partir del valor máximo se debe principalmente a la orientación del elemento y la dispersión del haz geométrico.
En la segunda configuración, la sonda se halla acoplada a una suela (zapata) SA32LS-N55S-Group D y es usada en el modo T-T para una geometría de D. E. C. El diámetro externo del tubo está determinado a 10,75 pulg. (273,05 mm). El AIM correspondiente para el difusor esférico se muestra a continuación:
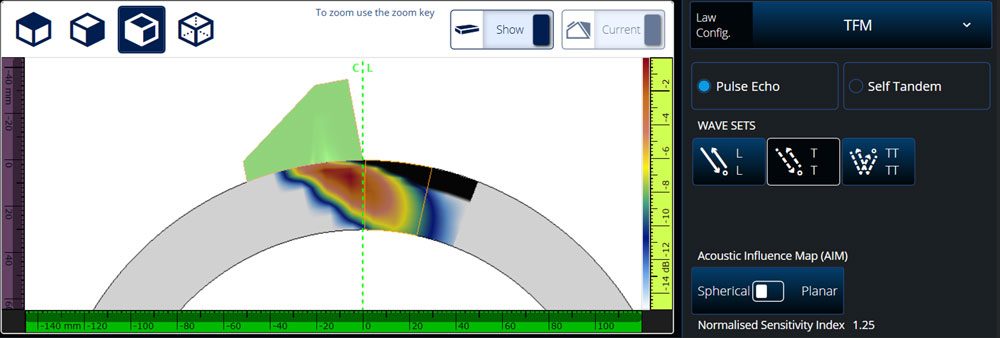
Configuración 2: AIM bajo la configuración TT para una geometría D. E. C. en un reflector esférico (índice de sensibilidad = 1,25)
En este AIM, notará que hay algunos píxeles en negro cerca de la superficie de D. E, directamente frente a la suela (zapata). Estos píxeles negros indican que hay por lo menos una trayectoria acústica que no puede trazarse del elemento al píxel debido a las limitaciones físicas de la suela (zapata). Note que el índice de sensibilidad ahora es de 1,25, lo que indica que un 24 dB de ganancia adicional sería necesario para obtener el mismo nivel de amplitud del defecto esperado como en las configuraciones previas de contacto. La disminución del índice de sensibilidad se debe predominantemente a la dispersión aumentada del haz geométrico y a los coeficientes de refracción en la interfaz de la suela (zapata)/pieza.
La tercera configuración es la misma que la segunda; pero, el AIM está dedicado a un reflector plano.
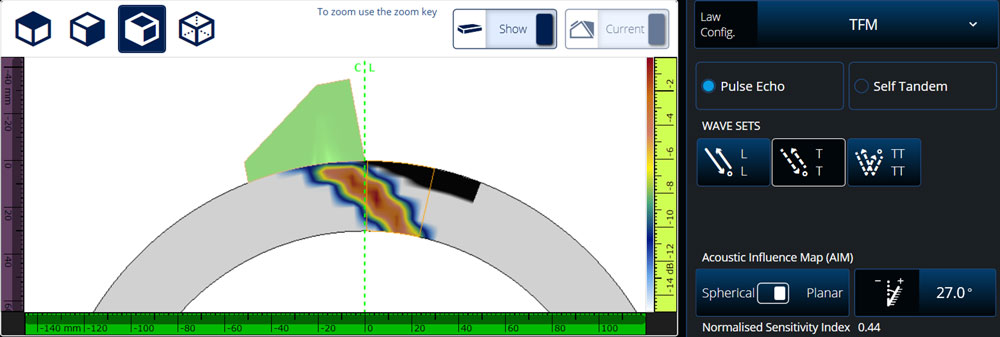
Configuración 3: AIM bajo la configuración TT para una geometría D. E. C. en un reflector plano (índice de sensibilidad = 1,25)
El ángulo del defecto fue determinado a 27° de manera que la normal del defecto fuese en su mayoría perpendicular a la dirección de propagación del haz principal. Incluso con la orientación óptima del defecto, el índice de sensibilidad para el difusor plano es solamente de 0,44 mm. El índice de sensibilidad es más bajo de 1,25 mm que el nivel del AIM anterior. Esto se debe a que la perpendicular perfecta entre la superficie del defecto y la dirección de propagación del haz no puede ser alcanzada en todas las combinaciones de los elementos emisores y receptores.
Visite la página Descargas de software(y busque «OmniScan») para actualizar su software a la versión MXU 5.10 y comenzar a beneficiarse de las nuevas actualizaciones del AIM.
Contenido relacionado
Informe técnico: Mapa de influencia acústica TFM
Preguntas formuladas frecuentemente sobre el método de focalización total (TFM)
Preguntas frecuentes acerca del procesamiento de imágenes por coherencia de fase
Contáctenos