Cartographie de l'influence acoustique en mode TFM
Chi-Hang Kwan
Guillaume Painchaud-April
Benoit Lepage
Article initialement présenté lors du Symposium de recherche de l’ASNT (American Society for Nondestructive Testing) en 2019.
RÉSUMÉ
Dans cet article, nous présentons un modèle semi-analytique nouvellement développé pour anticiper la sensibilité d’amplitude des défauts non directionnels et directionnels détectés à l’aide de la méthode d’inspection TFM (total focusing method). Lorsque des parcours sonores complexes supposent de multiples interactions entre interfaces et des conversions de modes, une bonne connaissance de la cartographie de l’influence acoustique (Acoustic Influence Map, AIM) permet à l’inspecteur de préciser son plan d’inspection en vue de maximiser le rapport signal sur bruit de l’image TFM résultante et d’augmenter la probabilité de détection des défauts. La précision de ce nouveau modèle acoustique a été éprouvée et validée au moyen de tests réalisés à l’aide de blocs étalons présentant des trous génératrices (SDH, side-drilled hole) et des trous à fond plat (FBH, flat-bottom hole). Les résultats de ces expérimentations démontrent une bonne corrélation entre la cartographie empirique de l’amplitude obtenue avec la méthode TFM et la cartographie théorique réalisée avec l’outil AIM. Les résultats indiquent également que le modèle est utile pour sélectionner le mode d’inspection TFM optimal.
INTRODUCTION
La méthode TFM est une technique de formation de faisceaux à ouverture synthétique qui a été développée activement dans l’industrie du contrôle non destructif (CND) au cours de la dernière décennie [1]. En appliquant des délais de transmission et de réception appropriés aux données A-scan réunies dans un ensemble de données acquises suivant une méthode de type full matrix capture (FMC), la méthode TFM permet la focalisation électronique des faisceaux sur chaque emplacement d’une zone d’inspection donnée. Comme chaque point est focalisé électroniquement, la méthode TFM offre une meilleure résolution en comparaison des techniques habituelles d’inspection par ultrasons multiéléments. De plus, en calculant et en appliquant les temps de vol de plusieurs modes acoustiques, la méthode TFM multimode peut fournir des renseignements supplémentaires sur l’échantillon inspecté [2].
Malgré ces avantages, la méthode TFM présente tout de même certaines limitations découlant des lois physiques. Ainsi, une zone d’inspection peut présenter une sensibilité médiocre en raison des effets d’interaction entre interfaces, des limitations relatives à la formation des faisceaux et de l’atténuation du parcours de propagation. En raison de la récence de la méthode TFM, de l’absence de codes d’inspection en la matière et de la complexité d’interpréter l’imagerie TFM multimode, les inspecteurs connaissent généralement mal les limites physiques de cette technique; par conséquent, ils arrivent mal à établir un plan d’inspection optimal qui maximise le rapport signal sur bruit (signal-to-noise ratio, SNR) et la probabilité de détection. Par conséquent, l’ajout d’un outil permettant d’anticiper le modèle de sensibilité acoustique pour un plan d’inspection TFM donné s’avère utile.
Région d’influence acoustique (Acoustic Region of Influence)
La cartographie de l’influence acoustique (Acoustic Influence Map, AIM) sert à cartographier la sensibilité de l’amplitude acoustique pour un plan d’inspection TFM donné. En général, la cartographie AIM diffère pour les diffuseurs de défauts directionnels et non directionnels. Entre autres exemples de diffuseurs non directionnels dans le domaine du CND, on note les scories et la porosité dans les soudures, tandis que les exemples de diffuseurs directionnels incluent le manque de fusion dans les soudures et divers types de fissures. La réponse de diffusion directionnelle d’un défaut est un paramètre important souvent négligé dans la cartographie de systèmes utilisant des sondes multiéléments.
Pour calculer la cartographie de l’influence acoustique, nous avons développé un modèle acoustique semi-analytique basé sur la propagation de rayons qui calcule la réponse en pression bidirectionnelle des modes d’inspection TFM par réflexion, tandem à une seule sonde et à double bond. Ce modèle acoustique prend en compte les effets des coefficients de transmission et de réflexion, la propagation géométrique du faisceau et l’atténuation dans le matériau. De plus, notre modèle utilise également l’intégrale de Rayleigh-Sommerfeld [3] pour modéliser la réponse de diffusion en champ lointain d’un trou à fond plat (FBH). Pour simuler les défauts directionnels, on utilise la réponse de diffusion en champ lointain du trou à fond plat.
TESTS DE VALIDATIONPour vérifier la précision du modèle acoustique, nous avons mené des tests de validation au cours desquels des cartographies d’amplitude TFM obtenues empiriquement ont été comparées à celles obtenues théoriquement au moyen de l’outil AIM. Cette section présente les résultats de ces deux tests de validation. Le premier test a été mené à l’aide d’un bloc étalon présentant des trous génératrices (SDH) de petit diamètre utilisés pour simuler la réponse de diffusion des défauts non directionnels. Le deuxième test a été mené à l’aide d’un bloc étalon présentant des trous à fond plat (FBH) utilisés pour simuler la réponse de diffusion des défauts directionnels. Les résultats présentés dans cet article établissent l’axe des x comme positif à la droite du premier élément de la sonde, et l’axe des z comme positif sous la surface de l’échantillon inspecté. La figure 1 montre un schéma de principe de ce système de coordonnées. | 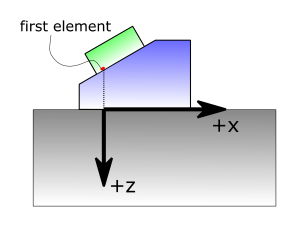 Figure 1 : Système de coordonnées utilisé pour illustrer les résultats de tests |
Validation de la cartographie obtenue pour un trou génératrice
Le test sur les trous génératrices a été mené à l’aide d’un bloc étalon métrique NAVSHIPS fait d’acier 1018 contenant six trous de 1,2 mm de diamètre situés à des profondeurs variant de 6,25 mm à 37,5 mm et espacés chacun de 6,25 mm. En retournant le bloc étalon, il est possible d’examiner les trous génératrices à des profondeurs variant de 6,25 mm à 68,75 mm. Pour ce test, nous avons utilisé une sonde 5L32-A31 à 32 éléments ayant une fréquence centrale de 5 MHz et un pas de 0,6 mm. La sonde a été couplée à un sabot en Rexolite SA31-N55S-IHC à 36,1°. La figure 2 montre un schéma de cette configuration.
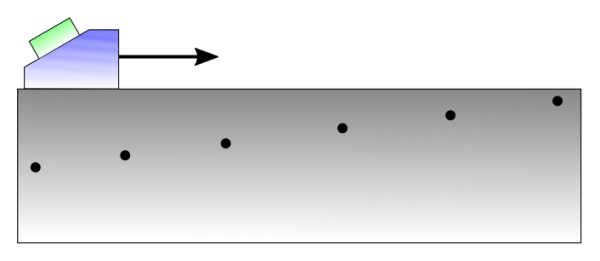
Figure 2 : Schéma de la configuration utilisée pour le test de validation. Note : seule la vue de dessus est illustrée.
En déplaçant la sonde le long de la surface du bloc étalon, nous avons obtenu des échos de diffusion provenant des trous génératrices situés à différentes positions par rapport à la sonde. Des groupes de données FMC ont été recueillis à chaque position de balayage aux fins du post-traitement qui permettra de générer les cartographies empiriques TFM de l’amplitude. Vous trouverez une description de l’algorithme de post-traitement utilisé à la sous-section suivante.
Génération de la cartographie empirique TFM de l’amplitude
Les principales étapes servant à générer la cartographie empirique TFM de l’amplitude sont les suivantes :
- Pour un défaut donné situé à une position de balayage fixe, utilisez une porte de profondeur (direction z) pour obtenir une ligne d’amplitude dans la largeur de la cartographie.
- Répétez l’étape 1 pour plusieurs positions de balayage afin d’obtenir une ligne d’amplitude composite pour un défaut donné.
- Répétez les étapes 1 et 2 pour tous les autres défauts afin d’obtenir des lignes d’amplitude composite à différentes positions en direction z.
- Interpolez les lignes d’amplitude composite dans la direction z afin d’obtenir la cartographie d’amplitude TFM finale.
La figure 3 montre l’étape 1. La figure 3 montre que nous produisons d’abord une bande TFM à des profondeurs précisées par la porte z. La position de la porte z est déterminée en fonction de la profondeur connue du défaut. À chaque position x le long de la bande TFM, l’amplitude maximale est acquise le long de la direction z afin d’obtenir la ligne d’amplitude illustrée au bas de la figure 3.
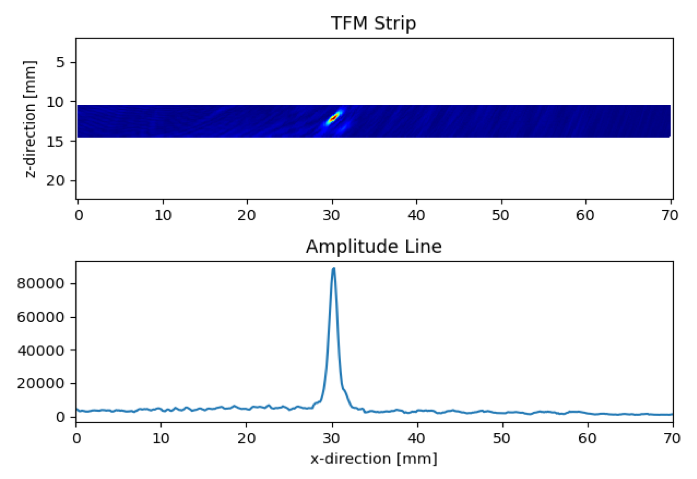
Figure 3 : Procédure pour obtenir une ligne d’amplitude pour un défaut donné situé à une seule position de balayage
Pour former la ligne d’amplitude composite pour un défaut donné, nous comparons toutes les lignes d’amplitude obtenues à différentes positions de balayage et nous conservons les valeurs d’amplitude maximales. La figure 4 montre cette procédure.
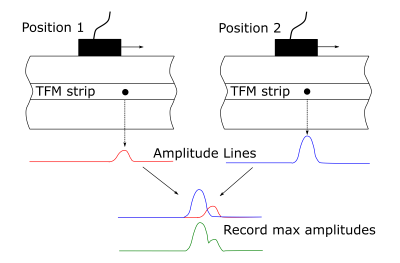
Figure 4 : Procédure pour produire des lignes d’amplitude composite à différentes positions de balayage
Après avoir formé la ligne d’amplitude composite pour un défaut donné, le processus est répété pour tous les défauts situés à différentes profondeurs. La figure 5 montre les lignes d’amplitude composite générées à l’aide du mode par réflexion TT et provenant des trous génératrices présents dans le bloc étalon NAVSHIPS (orientations du dessus et du dessous). La figure 5 et toutes les autres figures provenant des tests TFM présentées dans cet article montrent des images dont les amplitudes ne sont pas normalisées. Comme les composants électroniques utilisés pour l’acquisition sont munis d’un numériseur de 12 bits et que la sonde contient 32 éléments, l’amplitude maximale théorique de l’image TFM est de 2097152 (212 ÷ 2 × 32 × 32).
Notez que les lignes d’amplitude composite pour les trous génératrices situés à des profondeurs de 6,25 mm, 62,5 mm et 68,75 mm n’étaient pas incluses dans la figure 5. En raison de la proximité de ces trous génératrices avec les limites latérales du bloc étalon, il n’a pas été possible d’obtenir des lignes d’amplitude composite complètes sur toute la largeur de la cartographie.
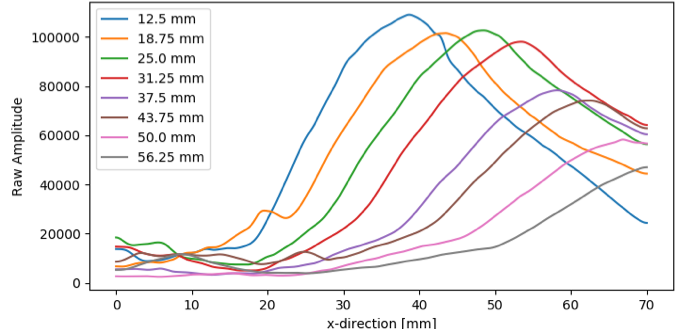
Figure 5 : Lignes d’amplitude composite des trous génératrices du bloc étalon NAVSHIPS
Comparaison des cartographies empiriques TFM et de celles générées par l’outil AIM
En effectuant une interpolation en direction z sur les lignes d’amplitude composite illustrées à la figure 5, nous avons obtenu la cartographie empirique TFM de l’amplitude illustrée à la figure 6 (a).
La figure 6 (a) montre que ce plan d’inspection TFM a une faible sensibilité à la fois aux angles de déflexion bas (30°) et élevés (> 70°). La mauvaise sensibilité à de faibles angles de déflexion est due aux faibles valeurs de coefficient de transmission entre le sabot en Rexolite et le bloc étalon en acier [4]. En revanche, la mauvaise sensibilité à des angles de déflexion élevés est due à la mauvaise focalisation causée par des nombres d’ouvertures effectifs élevés [5]. Ces résultats sont cohérents avec les recommandations en matière d’angle de déflexion dans le cadre d’inspections angulaires par ultrasons multiéléments [6].
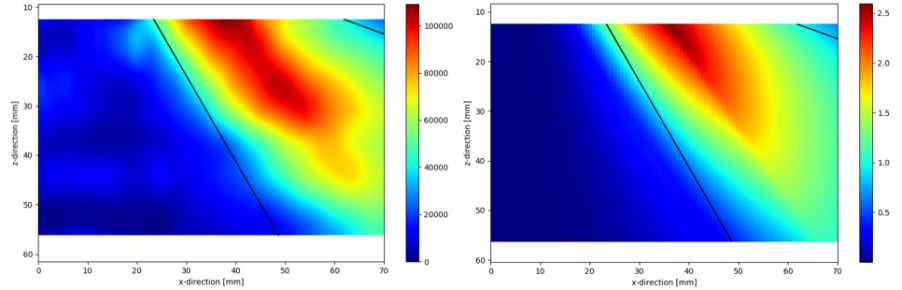
Figure 6 : (a) Cartographie empirique de l’amplitude des trous génératrices et (b) Cartographie théorique de l’amplitude des trous génératrices réalisée avec l’outil AIM Des angles de déflexion de 30° et 70° (à partir du centre de l’ouverture active) ont été ajoutés. La cartographie théorique AIM correspondante est illustrée à la figure 6 (b).
La comparaison des figures 6 (a) et (b) démontre que le modèle acoustique peut anticiper précisément la zone offrant une sensibilité optimale dans le plan d’inspection. Les écarts entre les deux figures peuvent être attribués aux légères variations de la pression appliquée pour le couplage lorsque la sonde est déplacée le long de la surface du bloc étalon. Notez que l’amplitude de la cartographie AIM théorique est en unités arbitraires, car il est extrêmement difficile de modéliser la magnitude exacte des signaux de tension reçus du système d’acquisition. Cependant, comme des unités arbitraires uniformes sont utilisées pour différentes cartographies AIM, il est toujours possible de comparer les sensibilités acoustiques TFM de différents plans d’inspection et de différents modes acoustiques.
Validation de la cartographie obtenue pour les trous à fond plat
Le test de validation du modèle acoustique utilisé pour anticiper la sensibilité d’amplitude des défauts directionnels a été mené à l’aide d’un bloc étalon usiné sur mesure. D’une épaisseur de 20 mm, ce bloc contenait des trous à fond plat percés de manière à correspondre au profil d’une soudure avec chanfrein en J typique. Dans le cadre de cette étude, nous utilisons les cinq trous à fond plat dont les vecteurs normaux de surface sont orientés à 3° sous l’horizontale. La figure 7 présente une photographie du bloc étalon et des axes de balayage.
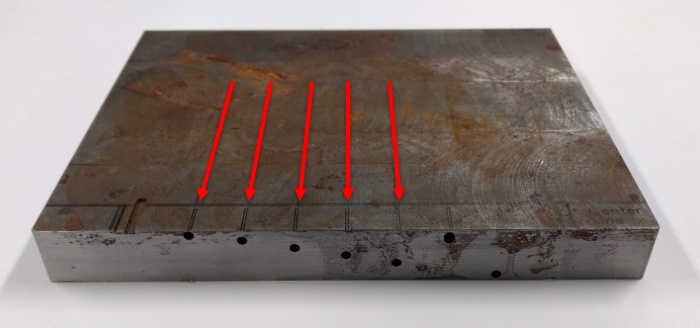
Figure 7 : Bloc étalon usiné sur mesure et axes de balayage
Pour ce test, nous avons utilisé une sonde 5L32-A32 de 32 éléments ayant une fréquence centrale de 5 MHz et un pas de 1 mm. La sonde a été couplée à un sabot en Rexolite SA32-N55S-IHC de 36,1°. Comme l’orientation des surfaces inférieures des trous à fond plat est presque verticale, les groupes de données FMC acquis ont été traités à l’aide des modes tandem à une seule sonde (bond simple). Un schéma de principe du plan d’inspection est montré à la figure 8.
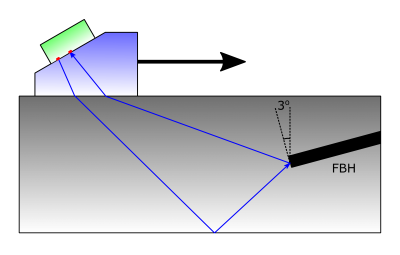
Figure 8 : Schéma de principe du test de validation montrant le mode tandem à une seule sonde
Comparaison des cartographies empiriques TFM et de celles générées par l’outil AIM
Pour les trous à fond plat, la cartographie empirique de l’amplitude et la cartographie théorique de l’amplitude obtenue avec l’outil AIM et le mode tandem à une seule sonde TTT apparaissent à la figure 9 (a) et (b) respectivement. En comparant les deux graphiques, on voit clairement que le modèle acoustique offre une estimation précise de la sensibilité acoustique relative dans la zone de balayage. La figure 9 laisse voir que le mode tandem à une seule sonde TTT est mieux adapté pour la détection de défauts verticaux situés près du fond de l’échantillon inspecté.
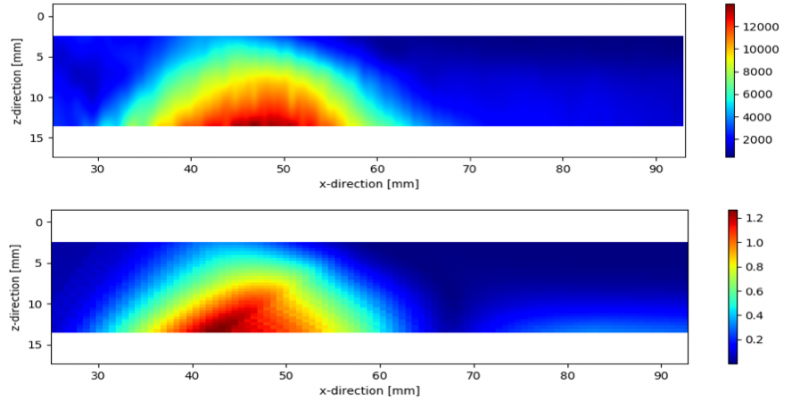
Figure 9 : (a) Cartographie empirique de l’amplitude des trous à fond plat et (b) cartographie théorique de l’amplitude des trous à fond plat obtenue avec l’outil AIM et le mode tandem à une seule sonde TTT
Pour les trous à fond plat, la cartographie empirique de l’amplitude et la cartographie théorique de l’amplitude obtenue avec l’outil AIM et le mode tandem à une seule sonde TLT apparaissent à la figure 10 (a) et (b) respectivement. Encore une fois, on voit clairement que le modèle acoustique a fourni une estimation précise de la sensibilité acoustique relative dans la zone de balayage. Les oscillations de la cartographie d’amplitude empirique de x = 25 mm à x = 40 mm sont causées par les interférences provenant d’autres modes acoustiques ayant des temps de parcours similaires.
De plus, en comparant la figure 9 à la figure 10, nous voyons que les rapports d’amplitudes maximales entre les deux modes tandem à une seule sonde sont d’environ 3,3 (13800/4200) pour les cartographies empiriques et d’environ 3,4 (1,23/0,36) pour les cartographies théoriques réalisées avec l’outil AIM. La similitude entre les rapports d’amplitude suggère que le modèle acoustique peut également être utilisé pour anticiper la sensibilité acoustique relative pour différents modes d’imagerie TFM.
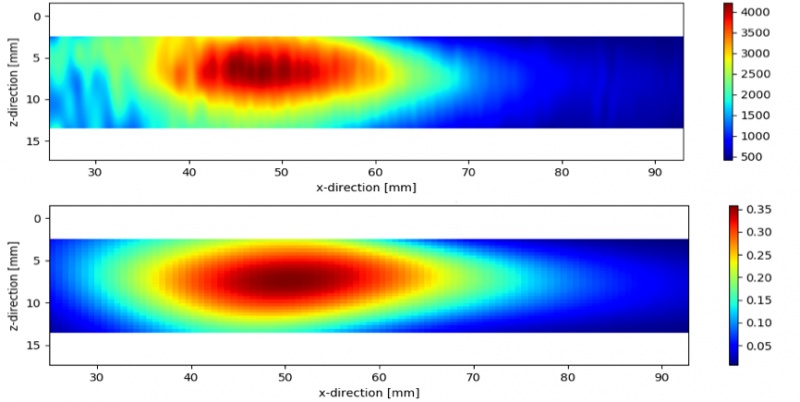
Figure 10 : (a) Cartographie d’amplitude empirique des trous à fond plat et (b) cartographie théorique de l’amplitude des trous à fond plat obtenue avec l’outil AIM et le mode tandem à une seule sonde TLT
EXEMPLE D’APPLICATION
Pour démontrer encore mieux l’utilité du modèle acoustique, nous présentons un exemple d’application réelle où la cartographie théorique effectuée avec l’outil AIM est utilisée pour orienter notre choix de mode d’inspection TFM. Aux fins de cet exemple, nous avons inspecté une soudure en V présentant un manque de fusion (défaut connu). L’angle de soudure est d’environ 35°; nous avons utilisé la sonde 5L32-A32 et le sabot SA32-N55S-IHC, les mêmes que ceux utilisés pour le test de validation des trous à fond plat. La figure 11 montre un schéma de principe de cette configuration.
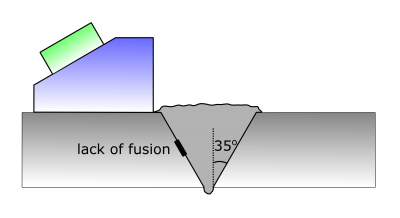
Figure 11 : Schéma de l’inspection d’une soudure présentant un manque de fusion
Dans le modèle théorique, le défaut de manque de fusion est simulé par un trou à fond plat de 5 mm de diamètre dont la surface inférieure est orientée à 35° par rapport à la verticale. Les cartographies théoriques AIM correspondantes pour le mode tandem à une seule sonde TLT et le mode à double bond TTTT sont illustrées à la figure 12.
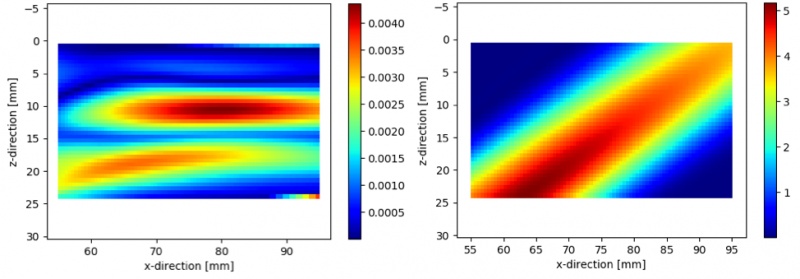
Figure 12 : Cartographie AIM d’un plan d’inspection pour inspecter un manque de fusion : (a) mode tandem à une seule sonde TLT et (b) mode à double bond TTTT
La figure 12 montre que la cartographie AIM pour le mode TLT est plus irrégulière que celle du mode à double bond. Par conséquent, il serait plus difficile d’obtenir une évaluation fiable de la dimension du défaut de manque de fusion en utilisant le mode TLT. De plus, l’amplitude escomptée pour le mode TLT est inférieure de 3 ordres de grandeur par rapport au mode à double bond. Ces cartographies AIM théoriques nous permettent de constater que le mode TTTT à double bond constitue le mode d’imagerie TFM préconisé dans ce cas. Les images TFM expérimentales correspondantes apparaissent à la figure 13.
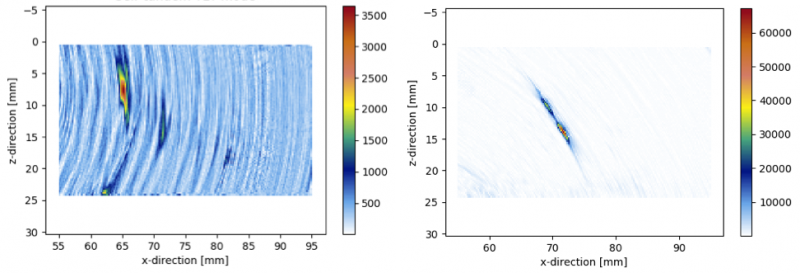
Figure 13 : Images TFM d’un défaut de manque de fusion (a) en mode tandem à une seule sonde TLT et (b) en mode à double bond TTTT
La figure 13 démontre que l’image TFM à double bond présente un bon rapport signal sur bruit et fournit une évaluation claire de la dimension du défaut de manque de fusion. En revanche, l’image TFM en mode tandem à une seule sonde affiche un rapport signal sur bruit médiocre et contient des échos isolés qui sont difficiles à interpréter. Il s’agit probablement d’échos diffractés provenant des rebords affilés du défaut de manque de fusion. Néanmoins, la dimension et le type de défaut sont difficiles à évaluer en mode tandem à une seule sonde TLT.
Le mauvais rapport signal sur bruit de l’image TFM en mode tandem à une seule sonde TLT corrobore la faible amplitude indiquée par la cartographie théorique AIM de la figure 12 (a). Cependant, il convient de noter que le rapport des amplitudes d’écho pour les deux modes de la figure 13 est inférieur au rapport d’amplitude anticipé par la cartographie théorique AIM de la figure 12. Comme la géométrie du défaut de manque de fusion est différente de celle du trou à fond plat utilisé pour simuler le défaut, les amplitudes des échos diffractés provenant des rebords affilés du défaut de manque de fusion pourraient être sous-estimées dans le modèle théorique.
CONCLUSIONS
Nous avons démontré l’efficacité d’un modèle acoustique qui peut anticiper précisément la cartographie d’amplitude TFM pour les défauts non directionnels et directionnels. Pour un mode d’inspection donné, le modèle peut être utilisé pour faire des ajustements au plan d’inspection (ouverture, fréquence de balayage, emplacement de la sonde, etc.) en vue d’optimiser le rapport signal sur bruit et la probabilité de détection. Comme le modèle fournit une comparaison de l’amplitude relative à partir de différents modes acoustiques, il peut également être utilisé pour sélectionner le mode de reconstruction TFM optimal. Nous prévoyons d’appliquer le modèle à des géométries plus complexes et, pour en accroître l’utilité, inclure davantage de modèles de diffuseurs.
RÉFÉRENCES
[1] HOLMES, C., DRINKWATER, B. W. et WILCOX, P. D. « Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation », NDT E Int., vol. 38, n° 8, déc. 2005, pp. 701–711.
[2] BREDIF, K. Sy, P., IAKOVLEVA E., ROY O. et LESSELIER D. « Development of methods for the analysis of multi-mode TFM images », J. Phys. Conf. Ser., vol. 1017, mai 2018, p. 012005.
[3] L. W. S. Jr « Fundamentals of Ultrasonic Nondestructive Evaluation: A Modeling Approach », 2e éd., Springer International Publishing, 2016.
[4] COBBOLD, R. S. C. « Foundations of Biomedical Ultrasound », Oxford University Press, 2006.
[5] NIKOLOV, S. I., KORTBEK, J. et JENSEN J. A. « Practical applications of synthetic aperture imaging », IEEE International Ultrasonics Symposium, San Diego, CA, 2010, pp. 350–358.
[6] GINZEL, E. A. et JOHNSON, D. « Phased-Array Resolution Assessment Techniques », NDT.net, juillet 2008, p. 13.