엔벨로프 특성이 있는 TFM(Total Focusing Method) 사용
Nicolas Badeau1 Guillaume Painchaud-April1 Alain Le Duff1
1Olympus NDT Canada
3415 Rue Pierre-Ardouin
Quebec QC, G1P 0B3
요약
이 백서에서는 TFM(Total Focus Method) 이미지의 엔벨로프를 계산하는 방법과 이 TFM 엔벨로프를 규정 준수 솔루션의 일부로 사용할 경우의 이점에 대해 설명합니다. TFM 엔벨로프는 두 가지 TFM 이미지 즉, 표준 획득된 FMC(Full Matrix Capture)를 사용하여 계산된 첫 번째 TFM 이미지와 힐버트(Hilbert) 변환된 FMC를 사용하여 계산된 두 번째 TFM 이미지의 기준을 계산하여 얻습니다. 결과 TFM 엔벨로프 이미지는 동일한 그리드 해상도에서 표준 진동 TFM 이미지에 비해 진폭 변화에 더 안정적이기 때문에 진폭 기반 크기 조정 방법에 더 나은 기반을 제공합니다. 따라서 표준 진동 TFM에 있어 TFM 엔벨로프에서 설정할 수 있는 그리드 해상도가 적을수록 결국 총 계산량이 줄어 궁극적으로 결과 획득 속도를 높일 수 있습니다.
도입
TFM(Total Focusing Method)은 재료와 구조물을 비파괴적인 방식으로 평가하는 최신 기법입니다. 현재 특정 표준과 규정에는 FMC(Full Matrix Capture)와 비파괴 테스트(NDT)용 TFM에 대한 섹션이 포함되어 있습니다[1], [2].
OmniScan™ X3 결함 탐상기와 같은 일부 NDT 장치는 실시간 TFM 이미징을 지원합니다. FMC를 사용한 TFM 방식은 다음 섹션에 요약되어 있지만, 기본 전제는 TFM이 다수의 기본 A-스캔 진폭 값의 합계를 기반으로 한다는 것입니다. TFM 이미지는 기본적인 A-스캔의 음향파 기원으로 인해 진동합니다. 반면에 NDT 애플리케이션에서 나타나는 특성화 체계는 기본적으로 진폭 기반 기법으로서 진동 작용을 불필요한 음향 구조물로 간주할 수 있습니다. 진동 작용을 특성화 체계에 적응시키는 데 사용되는 일반적인 방법은 진폭을 수정하는 것이므로 이미지는 엄격한 양의 값을 갖는 것으로 나타납니다. 이 방식은 완전히 진동하는 상대 이미지와 관련하여 이미지의 해석을 용이하게 해주지만, 이 백서에서는 신호 엔벨로프를 사용하면 특성화 작업을 더욱 개선하고 표준 진동 TFM 이미지 획득 속도를 실제로 높일 수 있는 방법을 보여줄 것입니다.
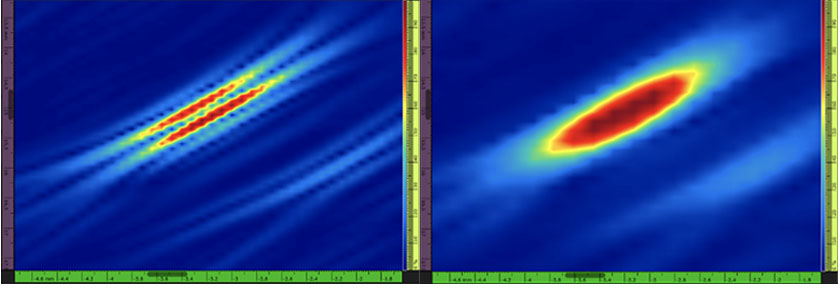
그림 1 - 왼쪽: 엄격한 양의 진폭 값과 신호 진동(즉, 표준 TFM)을 갖는 SDH(Side-Drilled Hole)의 TFM 이미지의 예입니다. 그리드 해상도는 0.08mm(λ/8.1)이고 최대 진폭은 108.7%입니다. 오른쪽: 정확히 동일한 SDH의 TFM 엔벨로프입니다. 그리드 해상도는 0.16mm(λ/4.0)이고 최대 진폭은 122.6%입니다.
이러한 진동 TFM 이미지를 사용할 경우 몇 가지 단점이 있습니다. 첫째, TFM 그리드 해상도 즉, 프레임에서 두 픽셀 사이의 거리는 약 λ/8이어야 규정을 준수할 수 있습니다[1]–[3]. 이 논문에서 λ는 프로브의 중심 주파수 및 이 부품의 음향 속도와 관련된 파장입니다. 그리드 해상도가 낮으면 계산 작업이 많아져 획득 속도가 즉시 낮아집니다. 진폭 기반 결함 크기 조정 방법과 관련된 견고성도 진동 TFM의 영향을 받습니다. 실제로 측정된 에코의 최대 진폭은 획득된 신호의 위상 오프셋에 따라 크게 달라집니다.
이 모든 문제는 이미지에서 신호 진동을 제거하고 보다 안정적인 최대 진폭 측정을 가능하게 하기 때문에 TFM 엔벨로프를 사용하여 해결할 수 있습니다(그림 1 참조). TFM 엔벨로프는 그리드 해상도를 낮춰야 하므로 즉, 표준 TFM과 비교하여 동일한 진폭 견고성을 위해 인접한 두 픽셀 간격을 늘려야 하기 때문에 TFM 엔벨로프를 사용하면 획득 생산성이 확보됩니다. 예를 들어, 그리드 해상도가 약 λ/4이면 TFM 엔벨로프에서 해상도 λ/8을 갖는 표준 진동 TFM과 동일한 진폭 충실도(2dB)를 갖기에 충분합니다[3].
본 논문의 목표는 NDT 전문가에게 TFM 엔벨로프 사용의 이점을 알리는 데 있습니다. 먼저 FMC-TFM 접근법의 개요를 소개한 후 TFM 엔벨로프의 계산에 대한 개념을 간략하게 설명합니다. 마지막으로, 표준 진동형 TFM 이미지에 비해 TFM 엔벨로프를 규정 준수 솔루션의 일부로 사용할 때의 이점에 대해 설명합니다.
FMC-TFM 접근법 요약
초음파 위상 배열의 특징은 검사 중인 부품의 원하는 위치에 집속할 수 있다는 점입니다. 위상 배열 집속 방식은 전송과 수신 모두에서 지연을 사용하여 관심 위치에서 짧은 펄스 신호의 이동 시간을 동기화합니다. 표본해상도는의 초점 영역에서 발생된 음향 빔의 전체 폭은 작아지고, 해당 검출 해상도는 크게 증가합니다[4]–[12].
TFM은 이 기능을 자연스럽게 확장한 것입니다. 즉, TFM은 검사 중인 부품 내부에 있는 관심 영역의 모든 위치에서 위상 배열 집속 및 조종 기능을 통해 집속 빔을 생성하며, 집중된 고해상도 데이터 포인트 세트만 작동자에게 제공됩니다[13][16]. 흔히 관심 영역은 요청된 모든 집속 대상의 균일한 데카르트 그리드로 구성됩니다. 물론, 기존 물리적 빔포밍 방식을 사용하여 각 그리드 위치에서 이러한 집속을 확보하는 것은 모든 관심 위치에 도달하는 데 필요한 물리적 음향 전파 시간 때문에 상당히 시간 소모적일 것입니다.
NDT 애플리케이션에서 일반적인 초음파 음파는 선형이기 때문에 특정 조리개의 모든 기여 요소에 대한 실제 음향장 중첩에서 비롯되는 물리적인 빔포밍은 FMC(Full Matrix Capture) 데이터 세트를 기반으로 한 획득 후 프로세스로 에뮬레이션될 수 있습니다. FMC 데이터 세트를 검색하려면 수신 조리개를 구성하는 모든 요소에서 오는 신호를 기록해야 하는 동시에 송신 조리개를 구성하는 모든 개별 요소에서 음향 방출이 생성됩니다. 따라서 FMC 데이터 세트는 송신 및 수신 요소의 모든 조합에 대해 다수의 기본 A-스캔을 통해 형성됩니다.
기존의 집속 위상 배열과 마찬가지로, 지정된 집속 위치에서 집속 진폭을 확보하려면 다음 작업이 필요합니다.
- 조리개의 송신 및 수신 요소 전체 쌍에서 음향 전파가 선택한 그리드 관심 위치와 일치하는 초점 위치에 도달한 후 수신 요소까지 다시 돌아오는 데 필요한 이동 시간의 계산
- 조리개의 송신 및 수신 요소 전체 쌍에서 적절한 전체 송신-수신 이동 시간에 해당하는 진폭 데이터 포인트 선택
- 송신 및 수신 조리개의 모든 기여 요소에서 선택한 모든 진폭 데이터 포인트 합계
- 처음 선택한 그리드 위치에서 합계한 결과 진폭의 배치
관심 영역의 모든 그리드 위치에서 이 단계를 반복하면 송신 및 수신 모두에서 모든 진폭 값이 집속 빔과 일치하는 진폭 맵이 생성됩니다. FMC 데이터를 사용하여 관심 영역(즉, TFM 영역)의 각 위치에서 집속된 진폭 맵을 생성하는 이 방법을 FMC-TFM 접근법이라고 합니다.
TFM 엔벨로프를 계산하는 방법
이 섹션에서는 표준 TFM에서 획득된 것과 동일한 기본 A-스캔(FMC)을 사용하여 TFM 엔벨로프를 계산하는 방법을 설명합니다. 엔벨로프는 물리적 표현을 나타내고 단순한 이미지 평활도 알고리즘이 아니라는 점에 유의해야 합니다. TFM 이미지의 엔벨로프는 개별 A-스캔 구성에 기반을 두고 있습니다. 첫째, 그 작용을 도식적으로 설명하기 위해 엔벨로프 개념은 가우시안 펄스 시계열을 사용하여 표현됩니다. 이 프로세스는 경험적 A-스캔 및 전체 TFM 프레임에도 적용됩니다.
신호 a(t)는 획득된 신호 즉, FMC를 통해 획득된 기본 A-스캔과 동등한 것으로, 실제로 복합 분석 신호 z(t)의 실수 부분이며, 이것은 다음과 같이 쓸 수 있습니다.

여기서 a'(t)는 분석 신호의 허수 부분이고, θ(t)는 신호의 순시 위상입니다. 허수 부분은 실제로 힐버트(Hilbert) 변환을 사용하여 계산됩니다[17]. 신호 엔벨로프는 분석 신호의 기준에 해당하며, 다음과 같이 쓸 수 있습니다.
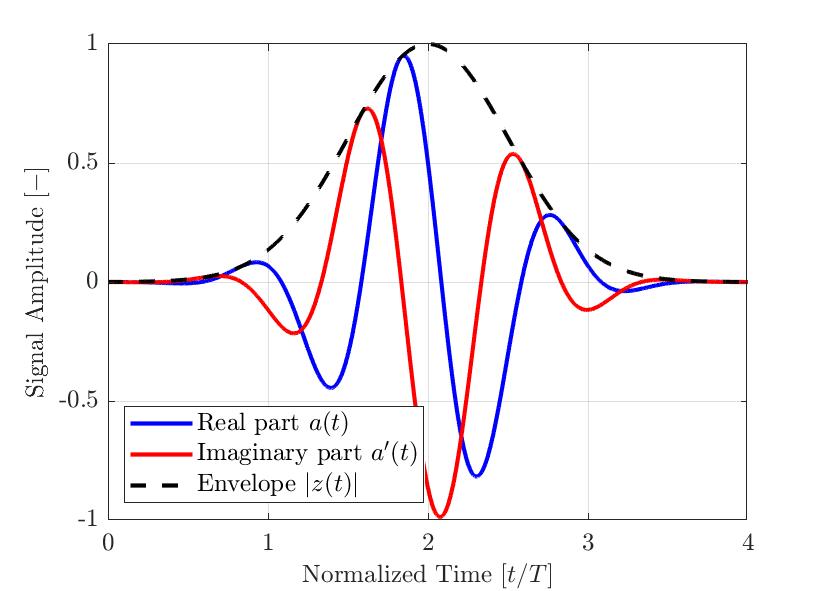
그림 2 - NDT 애플리케이션의 전형적인 가우시안 변조 펄스. 실수 부분과 허수 부분 및 계산된 엔벨로프가 표시됩니다. 시간 축은 펄스에서 선택된 중앙 주파수 주기로 정규화됩니다.
그림 2는 단순 가우시안 변조 펄스 a(t)의 예를 보여 줍니다. 실제 신호 a(t)는 파란색이고, 힐버트 변환 허수 부분 a'(t)는 빨간색이며, 결과 엔벨로프 |z(t)|는 점선입니다. 위의 방정식에서 볼 수 있듯이, 신호 엔벨로프 |z(t)|는 신호의 순시 위상 θ(t)에 영향을 받지 않습니다. 따라서 서로 다른 위상 오프셋 ϕ를 갖는 신호는 동일한 엔벨로프를 가질 수 있습니다. 그림 3은 서로 다른 위상 오프셋 ϕ를 갖는 여러 가우시안 변조 펄스와 결과 엔벨로프를 보여줍니다. 따라서 신호의 측정된 최대 진폭은 신호 엔벨로프을 사용할 때 분석 신호의 실수 성분의 절대값보다 더 안정적입니다.
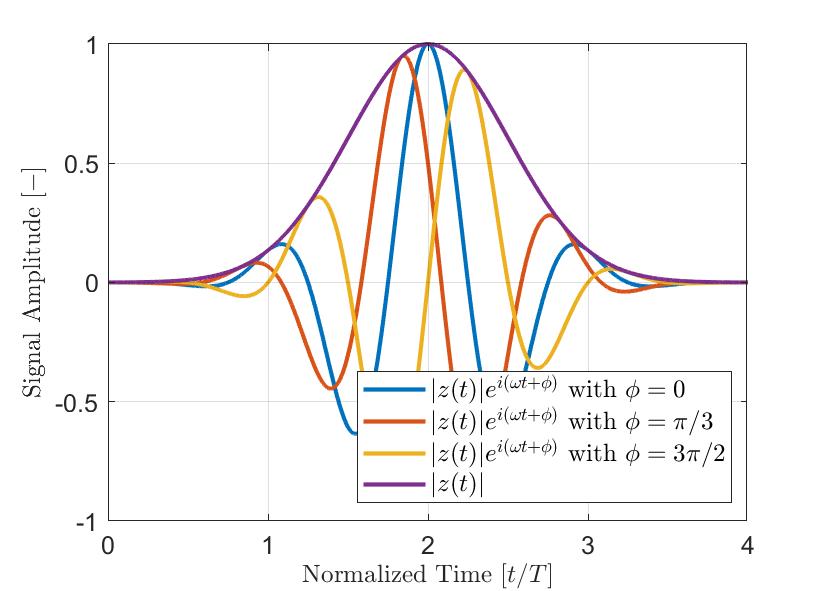
그림 3 - 서로 다른 위상 오프셋 ϕ를 갖는 일반적인 가우시안 변조 펄스(|z(t)|ei(ωt+ϕ)). 이 신호의 엔벨로프 |z(t)|는 분석 신호의 순시 위상과는 분명히 독립적입니다.
동일한 프로세스를 사용하여 경험적 A-스캔의 엔벨로프를 확보할 수 있습니다. 그림 4는 FMC를 통해 획득한 일반적인 기본 A-스캔을 나타내고, 그림 5는 힐버트 변환(빨간색)과 계산된 엔벨로프(점선)를 적용한 동일한 A-스캔(파란색)을 나타냅니다. 표시된 모든 신호는 진폭 엔벨로프의 최대값으로 정규화됩니다.
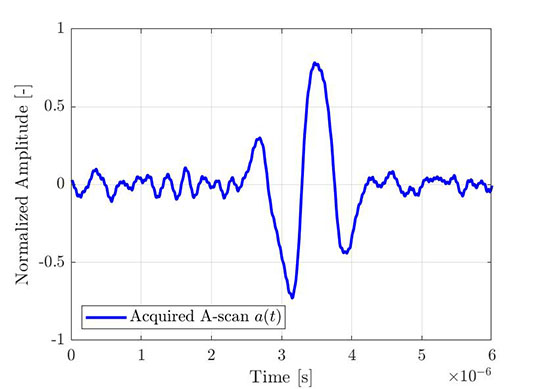 그림 4 - 획득된 기본 A-스캔의 일부(FMC 획득에서). | 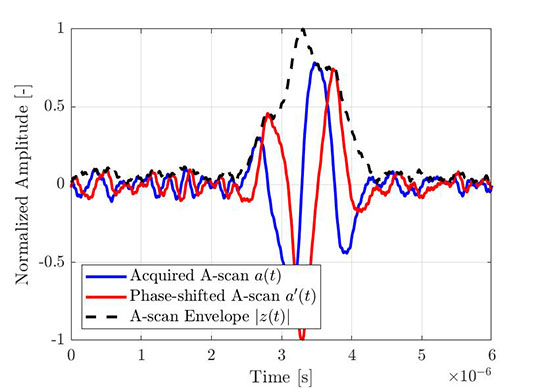 그림 5 - 힐버트 변환 및 계산된 엔벨로프를 적용한 동일한 기본 A-스캔. |
개별 그리드 포인트 인덱스(k,l)를 포함한 TFM 엔벨로프 이미지는 모든 기여 A-스캔의 분석 신호를 사용하여 계산됩니다[15]. 이것은 실제로 표준 FMC 획득 데이터를 사용하여 계산된 표준 TFM 프레임 x(k,l)과 FMC 데이터의 힐버트 변환으로 계산된 TFM 프레임 x'(k,l)로 구성된 분석 TFM 이미지 y(k,l)의 기준을 계산한 결과입니다. 두 경우 모두 동일한 지연 세트가 사용됩니다. 그런 다음 TFM 엔벨로프는 다음 식을 사용하여 계산됩니다.

따라서 TFM 엔벨로프 이미지는 TFM 이미지 2개를 조합한 결과입니다(그림 6 참조). 즉, 하나는 기본 A-스캔의 실수 성분에서 유도되고 다른 하나는 기본 A-스캔의 계산된 허수 성분에서 유도됩니다. 이 프로세스는 계산 부담을 가중시키고 NDT 장비의 획득 속도를 감소시키지만, 다음 섹션에서는 진폭 충실도에 영향을 주지 않고 필요한 그리드 해상도를 크게 줄여 표준 TFM을 사용할 때보다 높은 속도로 획득 속도를 높일 수 있음을 직접 보여줄 것입니다.
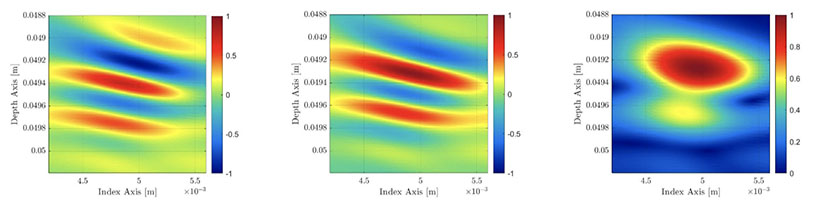
그림 6- 왼쪽: 표준 TFM 프레임(절대값 아님). 중간: FMC의 힐버트 변환을 사용하여 계산된 TFM 프레임. 오른쪽: 결과 TFM 엔벨로프 이미지.
TFM 엔벨로프 사용의 장점
이 섹션에서는 여러 TFM 프레임을 λ/9.3부터 λ/4.0에 이르는 여러 그리드 해상도비와 비교하고 다양한 중요 검사 메트릭을 모니터링하여 TFM 엔벨로프의 이점을 직접 설명합니다. 결과는 1mm 직경의 SDH(Side-Drilled Hole)가 있는 강철 블록에 SA31-N55S-IHC 웨지와 5L32-A31 프로브를 사용하여 확보했습니다(그림 7 참조). 웨지와 강철 블록 사이에서 접촉매질(Sonotech Ultragel II)이 사용됩니다. 데이터는 Olympus OmniScan™ X3 결함 탐상기를 사용하여 획득됩니다. 펄스-에코(T-T) 음향 경로가 선택되고 영역 크기는 (20mm × 20 mm)입니다. 선택한 부품 및 음향 경로와 관련된 파장은 λ=0.648mm입니다. 그리드 해상도는 파장 분율 단위로 표시됩니다.
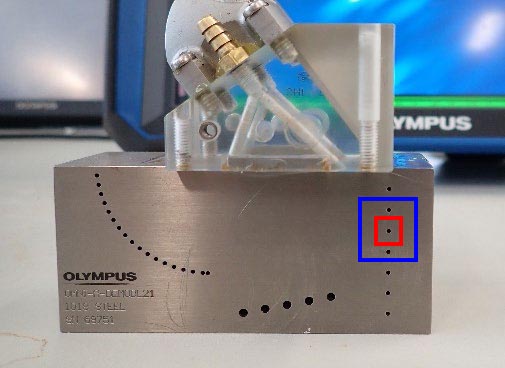
그림 7 - 표 1의 TFM 이미지를 획득하는 데 사용된 설정을 보여주는 사진. 파란색 직사각형은 전체 관심 영역(20mm × 20mm)에 해당되며, 빨간색 직사각형은 표 1 이미지에 표시된 확대된 관심 영역(5mm × 5mm)에 해당됩니다. 5L32-A31 프로브와 SA31-N55S-IHC 웨지를 사용했습니다. 강철 블록의 두께는 40mm입니다.
표 1은 표준 TFM과 TFM 엔벨로프 모두에서 λ/9.3~λ/4.0 범위의 네 가지 그리드 해상도 값에 대한 결과 TFM 이미지을 보여줍니다. 계산된 진폭 충실도 값[3] 및 결과 획득 속도는 각 TFM 이미지에 표시되어 있습니다.
그리드 해상도 | 표준 TFM | TFM 엔벨로프 |
|---|---|---|
λ/9.3 | 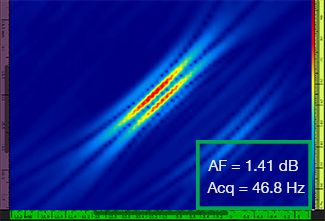 | 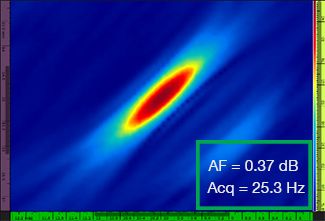 |
λ/8.1 | 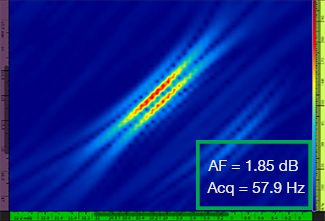 | 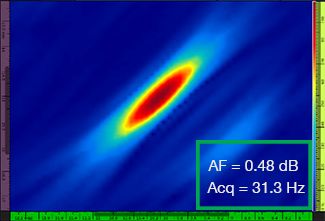 |
λ/5.9 | 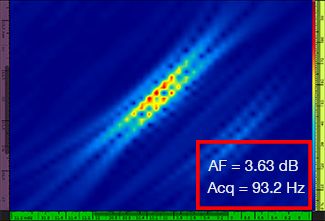 | 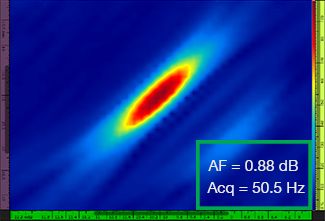 |
λ/4.0 | 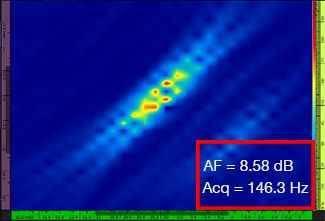 | 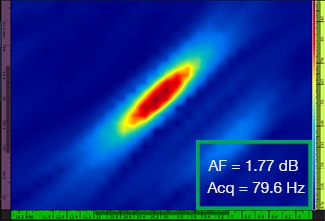 |
표 1 - 표준 TFM과 TFM 엔벨로프의 이미지 화질을 4개의 그리드 해상도 값에서 비교. 표시된 TFM 이미지는 확대되었습니다. 그림에서 AF는 진폭 충실도를 의미하며 Acq는 지정된 그리드 해상도로 확보한 획득 속도에 해당됩니다. 빨간색 상자는 규정 준수 2dB 진폭 충실도 값을 확보하지 못했음을 나타냅니다. 동등한 AF 값에서 높은 획득 속도를 기록합니다.
새로 적용되는 규정 및 표준[1, 2]에 따라 진폭 충실도 값이 2dB 이하이어야 합니다. 따라서 표준 TFM을 사용할 때 첫 번째 두 그리드 해상도 값(λ/9.3, λ/8.1)만이 규정을 준수합니다. TFM 엔벨로프는 코드 준수 진폭 충실도를 유지하면서 그리드 해상도(λ/4.0)를 낮춥니다. 다시 말해, 그리드가 거친 TFM 엔벨로프를 사용하면 규정 준수 표준 TFM(λ/8.1에서 57.9Hz)에서 확보된 가장 높은 획득 속도에 대해 약 37%의 획득 속도 증가를 유도합니다.
결론
TFM 이미지의 엔벨로프를 계산하는 방법을 간단한 예를 사용하여 설명했습니다. 신호의 엔벨로프는 순시 위상과 독립적이므로 진폭 기반 크기 조정 기법(예: 6dB 강하법)에 대한 보다 강력한 근거를 제공합니다. 신호 엔벨로프는 단순히 이미지 평활화일 뿐만 아니라 데이터 유실 위험을 유발할 수 있는 필터로 간주해서는 안 됩니다. TFM 이미징에서 엔벨로프을 사용하는 이점을 설명하기 위해 여러 그리드 해상도 값에서 엔벨로프가 있는 TFM 이미지와 엔벨로프가 없는 TFM 이미지를 비교했습니다. 결과 TFM 엔벨로프를 확보하기 위해 TFM 이미지 2개를 계산해야 하지만 규정 준수를 유지하면서 낮은 그리드 해상도를 사용하면 처리 부담을 크게 줄일 수 있습니다. 그 이유는 진폭 변동에 있어 엔벨로프가 안정적이기 때문입니다. 따라서 표준 TFM을 사용하여 처리된 동등한 이미지보다 더 빠른 속도로 진폭 크기에 맞게 조정된 이미지가 확보됩니다.
참고 문헌
[1] ASME Committee, “ASME BPVC.V Article 4 Mandatory Appendix XI Full Matric Capture.” ASME, 2019년.
[2] ASME Committee, “ASME BPVC.V Article 4 Nonmandatory Appendix F - Examination of Welds Using Full Matric Capture.” ASME, 2019년.
[3] N. Badeau, A. Le Duff, C.-H. Kwan, “Theoretical Model for Amplitude Fidelity Reading (submitted),” ASNT Research Symposium에서 발표, 2020년.
[4] A. C. Clay, S.-C. Wooh, L. Azar, J.-Y. Wang, “Experimental Study of Phased Array Beam Steering Characteristics,” Journal of Nondestructive Evaluation, vol. 18, no. 2, p. 13, 1999년.
[5] L. J. Bond, “Fundamentals of Ultrasonic Inspection,” ASM Handbook, vol. 17, no. Nondestructive Evaluation of Material, pp. 155–168, 2018년.
[6] S.-J. Song, H. J. Shin, Y. H. Jang, “Development of an ultra sonic phased array system for nondestructive tests of nuclear power plant components,” Nuclear Engineering and Design, vol. 214, no. 1–2, pp. 151–161, 2002년 5월, doi: 10.1016/S0029-5493(02)00024-9.
[7] S. Mahaut, O. Roy, C. Beroni, B. Rotter, “Development of phased array techniques to improve characterization of defect located in a component of complex geometry,” Ultrasonics, vol. 40, no. 1–8, pp. 165–169, 2002년 5월, doi: 10.1016/S0041-624X(02)00131-2.
[8] S. C. Mondal, P. D. Wilcox, B. W. Drinkwater, “Design of Two-Dimensional Ultrasonic Phased Array Transducers,” Journal of Pressure Vessel Technology, vol. 127, no. 3, pp. 336–344, 2005년 8월, doi: 10.1115/1.1991873.
[9] S.-C. Wooh, Y. Shi, “Influence of phased array element size on beam steering behavior,” Ultrasonics, vol. 36, no. 6, pp. 737–749, 1998년 4월, doi: 10.1016/S0041-624X(97)00164-9.
[10] Joon-Hyun Lee, Sang-Woo Choi, “A parametric study of ultrasonic beam profiles for a linear phased array transducer,” IEEE Trans. Ultrason., Ferroelect., Freq. Contr., vol. 47, no. 3, pp. 644–650, 2000년 5월, doi: 10.1109/58.842052.
[11] R. Ahmad, T. Kundu, D. Placko, “Modeling of phased array transducers,” The Journal of the Acoustical Society of America, vol. 117, no. 4, pp. 1762–1776, 2005년 4월, doi: 10.1121/1.1835506.
[12] B. W. Drinkwater and P. D. Wilcox, “Ultrasonic arrays for non-destructive evaluation: A review,” NDT & E International, vol. 39, no. 7, pp. 525–541, 2006년 10월, doi: 10.1016/j.ndteint.2006.03.006.
[13] P. D. Wilcox, “Exploiting the Full Data Set from Ultrasonic Arrays by Post-Processing,” in AIP Conference Proceedings, Brunswick, Maine (USA), 2006년, vol. 820, pp. 845–852, doi: 10.1063/1.2184614.
[14] J. Zhang, B. W. Drinkwater, P. D. Wilcox, “Effects of array transducer inconsistencies on total focusing method imaging performance,” NDT & E International, vol. 44, no. 4, pp. 361–368, 2011년 7월, doi: 10.1016/j.ndteint.2011.03.001.
[15] C. Holmes, B. W. Drinkwater, P. D. Wilcox, “Advanced post-processing for scanned ultrasonic arrays: Application to defect detection and classification in non-destructive evaluation,” Ultrasonics, vol. 48, no. 6–7, pp. 636–642, 2008년 11월, doi: 10.1016/j.ultras.2008.07.019.
[16] C. Holmes, B. W. Drinkwater, and P. D. Wilcox, “Post-processing of the full matrix of ultrasonic transmit–receive array data for non-destructive evaluation,” NDT & E International, vol. 38, no. 8, pp. 701–711, 2005년 12월, doi: 10.1016/j.ndteint.2005.04.002.
[17] D. Gabor, “Theory of Communication,” Journal of the Institution of Electrical Engineers, vol. 96, pp. 429–441, 1946년.